
 Rodney Jones first came to Abilities In Motion in the summer of 2013. A truck driver for several years, Rodney was injured while on the job. After several failed attempts to reset his leg for healing, the decision was made to amputate Rodney’s left leg.
Rodney Jones first came to Abilities In Motion in the summer of 2013. A truck driver for several years, Rodney was injured while on the job. After several failed attempts to reset his leg for healing, the decision was made to amputate Rodney’s left leg.
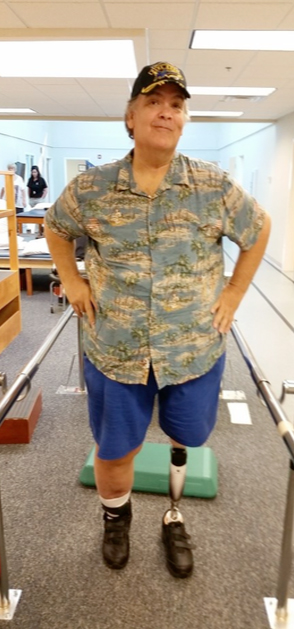
Rodney worked incredibly hard over the past 1.5 years to get to this place in his life. When Rodney started coming to AIM, Rodney also started working with Premier Physical Therapy (AIM’s inhouse PT). By coming in multiple times each week, Rodney has progressed from using a wheelchair, to parallel bars, to a walker, to a cane and finally has reached unassisted walking. The AIM and Premier teams are extremely proud of Rodney’s progress.
Rodney’s work-related injury forced him to live a very sedentary lifestyle before his amputation.
Though it took a good attitude and a lot of effort, Rodney is now 196 pounds lighter and living the life that he wants to live.
Recently, Rodney started driving by himself again. He has loved being able to regain the independence that he has lacked for so long. Along with AIM’s prosthetic care services and Premier’s physical therapy services, Rodney’s positive attitude has helped him come this far. To him, the amputation was just a “little speed bump” and he finds it important to have fun even in the midst of challenging times. Whether he is driving himself to the hardware store or riding his bike around the neighborhood, it is evident that Rodney is moving forward.
Rodney’s Hardware
 As a part of the rehabilitation process, Rodney initially used a prosthesis with a locking knee for 12 months. He then transitioned into using the technologically advanced Orion2 knee from Endolite.
As a part of the rehabilitation process, Rodney initially used a prosthesis with a locking knee for 12 months. He then transitioned into using the technologically advanced Orion2 knee from Endolite.
This microprocessor controlled knee unit uses Motion Integrated Intelligence (Mi2), which allows Rodney to feel more secure ashe stands, rides his bike, and walks. This knee can lock at various angles and features progressive speed control. Also,the sensors within the knee allow for Rodney to walk up ramps and hills with more security.
These components have allowed Rodney to progress from initially using a walker to now walking unassisted at variable walking speeds and negotiating ramps and stairs.